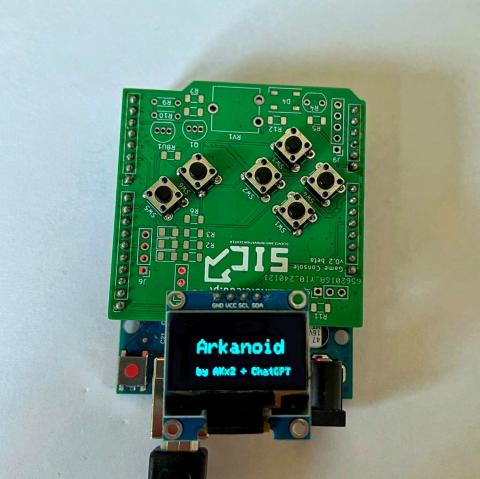
Projekt jest implementacją klasycznej gry Arkanoid. Jest to jedna z pierwszych gier zręcznościowych wykorzystujących grafikę na wyświetlaczach. Pojawiła się w automatach i na domowych konsolach w latach 80. XX wieku, jako rozwinięcie pomysłu z klasycznego Breakouta.
Gra rozgrywa się na dwuwymiarowej planszy do gry podzielonej na prostokątne pola - celem gracza jest odbijanie piłki za pomocą poziomej platformy i niszczenie bloczków rozmieszczonych na ekranie. Dynamika gry wynika z prostych zasad odbić i kolizji, a jej trudność rośnie z kolejnymi poziomami gry.
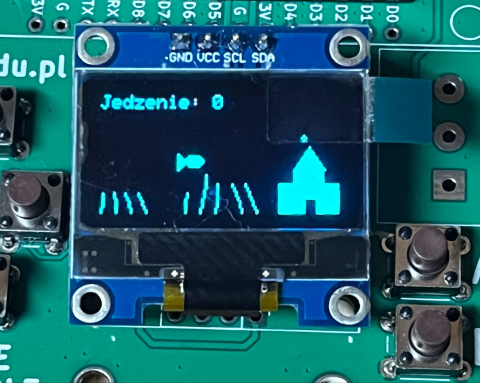
Jest to dwuosobowa gra oparta na mikrokontrolerach ESP8266 z wyświetlaczami OLED, symulująca karmienie rybki. Gracz steruje rybką, której zadaniem jest zbieranie spadającego pożywienia. Po zebraniu 10 porcji jako nagroda wypływa animowana ośmiornica. Dwie niezależne konsolki komunikują się ze sobą za pomocą sieci Wi-Fi - naciśnięcie przycisku na jednej z nich powoduje pojawienie się jedzenia na drugiej, co umożliwia rozgrywkę w trybie dwuosobowym.
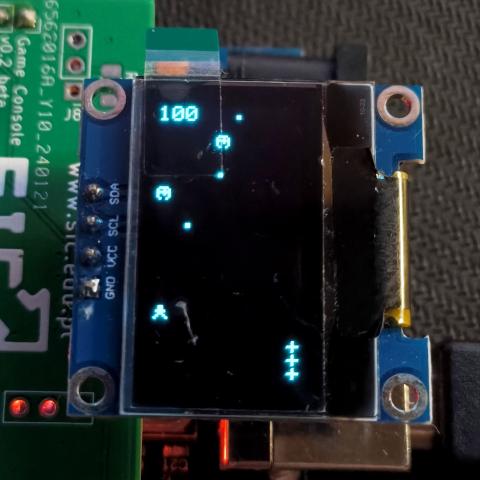
Projekt przedstawia prostą, ale wciągającą grę typu Space Shooter, działającą na mikrokontrolerze Arduino UNO z wykorzystaniem wyświetlacza OLED 128x64 piksele oraz shielda SIC Game Console. Gracz steruje statkiem kosmicznym, którego zadaniem jest eliminowanie nadlatujących wrogów. Gra posiada menu wyboru trudności, system punktów, żyć oraz ekran końcowy z wynikiem
Program pozwalający zrobić interaktywną kostkę 3d wirującą w osiach x oraz y, względem globalnego układu współrzędnych. Wygląda dużo lepiej niż brzmi zaufaj!

Układ jest prostym wzmacniaczem mikrofonowym o dużym wzmocnieniu, może służyć do rejestracji dźwięków z daleka takich jak np. śpiew ptaków, jest zasilany niskim napięciem 6V i ma niewiele elementów dlatego jest dobry dla początkujących

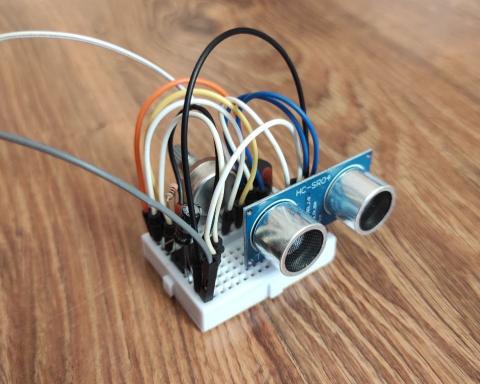
Prosty alarm dźwiękowy wykorzystujący czujnik odległości HC-SR04, timer NE555 oraz brzęczyk piezoelektryczny bez zastosowania Arduino.
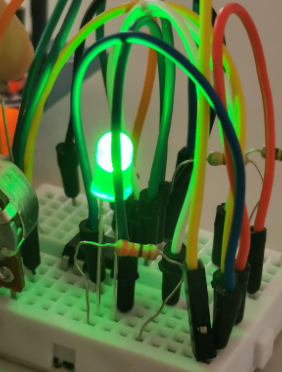
Ten układ elektroniczny służy do automatycznego włączania diody LED w zależności od natężenia światła.
Projekt nawilżacza powietrza obejmuje integrację wyświetlacza OLED oraz graficznego interfejsu użytkownika sterowanego za pomocą enkodera z fizycznymi peryferiami niezbędnymi do funkcjonowania całego urządzenia. Autorski program umożliwia kontrolę adresowalnej taśmy LED z algorytmem symulującym losowy ruch płomienia, a także regulację obrotów wentylatora wspomagającego ruch pary za pomocą sygnału PWM. Dodatkowo, dzięki zastosowaniu transoptora zapewniającego izolację galwaniczną, możliwy jest pomiar napięcia na akumulatorze i jego wyświetlanie w interfejsie użytkownika jak również ostrzeżenia o niskim stanie baterii. Nawilżacz pełni także funkcję power banku o pojemności 10 000 mAh. Całość wyróżnia się estetycznym wykonaniem oraz atrakcyjnymi efektami wizualnymi, które można konfigurować z poziomu interfejsu użytkownika.

Kamera rejestruje obrazy w odcieniach szarości (GRAYSCALE) o rozdzielczości 120x160 pikseli, z odświeżaniem co 0,3 s. Algorytm oblicza średnią jasność w skali od 0 do 255 na podstawie 960 pikseli. Regulator PID steruje diodą, aby zwiększać jasność otoczenia i osiągnąć zadaną wartość, np. do doświetlania biurka.

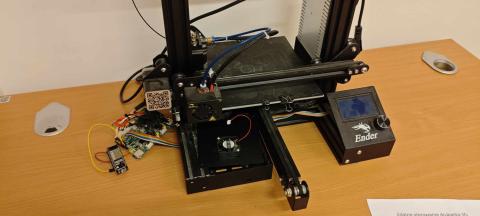
Celem tego projektu jest stworzenie taniej i kompaktowej alternatywy dla systemów takich jak OctoPrint, które wymagają urządzenia takiego jak np. raspberryPi. W obecnej fazie, ESP32 zostało połączone z płytą główną drukarki oraz został stworzony prosty interfejs HTML, dzięki któremu możemy zdalnie połączyć się z urządzeniem i wysyłać komendy G-code przez pole tekstowe oraz używać kilku przycisków które obsługują najczęściej używane komendy.